
前言
曾今在本科的时候接触过1
ROS
最近由于一些原因又重温了一下1
ROS
1
ROS
就比如我今天要讲的1
D Star
1
ROS
1
NAO
简介
本文主要解决如何在ROS上面使用Humanoid Robots Lab at the Albert-Ludwigs-University in Freiburg, Germany实验室编写的人形机器人路径规划模块
主要分为以下几个步骤进行:
- 安装最新版本的
1
ROS - 安装
1
humanoid_navigation - 如何使用
1
humanoid_navigation
安装ROS
安装步骤参考1.
在Ubuntu12.04上面安装有一个好处就是使用apt工具安装相对较简单,省去自行下载代码并安装相应支持库的麻烦.
现在的最新版本的1
ROS
1
Hydro
- 设置apt库的源列表:
1 | sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu precise main" > /etc/apt/sources.list.d/ros-latest.list'
|
- 设置密钥:
1 | wget http://packages.ros.org/ros.key -O - | sudo apt-key add - |
- 下载并安装ROS,并进行环境设置:
1 2 3 4 5 6 7 | sudo apt-get update sudo apt-get install ros-hydro-desktop-full sudo rosdep init rosdep update echo "source /opt/ros/hydro/setup.bash" >> ~/.bashrc source ~/.bashrc sudo apt-get install python-rosinstall |
安装humanoid_navigation包
安装步骤参考234.
在Ubuntu上面安装这个包在编译的时候会遇到一些问题,是由于boost版本与需要的版本不匹配造成的.
这个包依赖的相关库需要1
boost 1.46
1
boost 1.46
1 | sudo apt-get install libboost1.46-all-dev |
之后进行humanoid_navigation包的安装,其步骤如下,编译时候会缺少一些ros自带的库:
- 配置
1
catkin
1 2 3 | mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
|
- 使用
1
wstool1
humanoid_navigation
1 2 3 4 | wstool init wstool set humanoid_msgs --git https://github.com/ahornung/humanoid_msgs wstool set humanoid_navigation --git https://github.com/ahornung/humanoid_navigation -v hydro-devel wstool update |
- 安装
1
humanoid_navigation
1 2 | sudo apt-get install ros-hydro-humanoid-* sudo apt-get install ros-hydro-octomap-* |
- 编译工作目录:
1 2 3 | source ~/catkin_ws/devel/setup.bash cd ~/catkin_ws catkin_make |
使用humanoid_navigation包
使用步骤参考78.
编译好之后就可以使用1
humanoid_navigation
1
footstep_planner
其提供了3种规划算法和3种启发式,分别由1
/footstep_planner/planner_type
1
/footstep_planner/heuristic_type
- “ARAPlanner”: A* (ARA*)
- ADPlanner: Anytime Dynamic A* (AD*)
- RSTARPlanner: Randomized A* (R*)
启发式:
- “EuclideanHeuristic”: Straight-line distance to the goal
- “EuclStepCostHeuristic”: Straight-line distance to the goal with added footstep costs
- “PathCostHeuristic”: Distance along 2D path pre-planned with A* (preferred). This heuristic works best in most cases, as it is most informed of the environment. Note that it is potentially inadmissible in the case of stepping over obstacles.
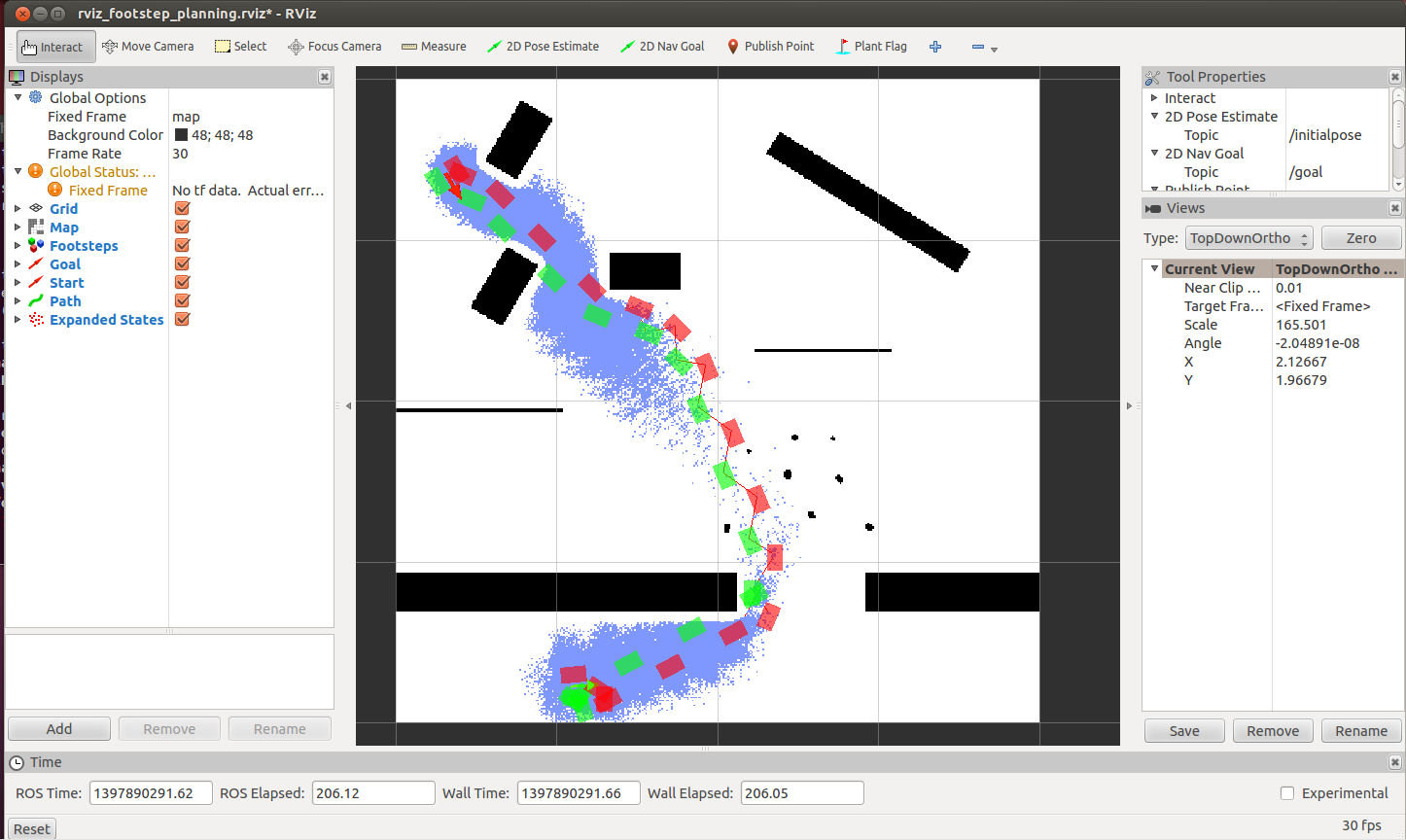
使用这个包进行一些模拟演示:
1 | roslaunch footstep_planner footstep_planner_complete.launch |
演示时使用1
2D Pose Estimate
使用1
2D Nav Goal
选择之后需要等一会才会产生结果.
演示结果类似下图:
控制参数改变路径规划算法8:
1 | rosparam set /footstep_planner/planner_type ADPlanner
|